Servo Cylinders in Parallel Mechanism Space Structures Robot
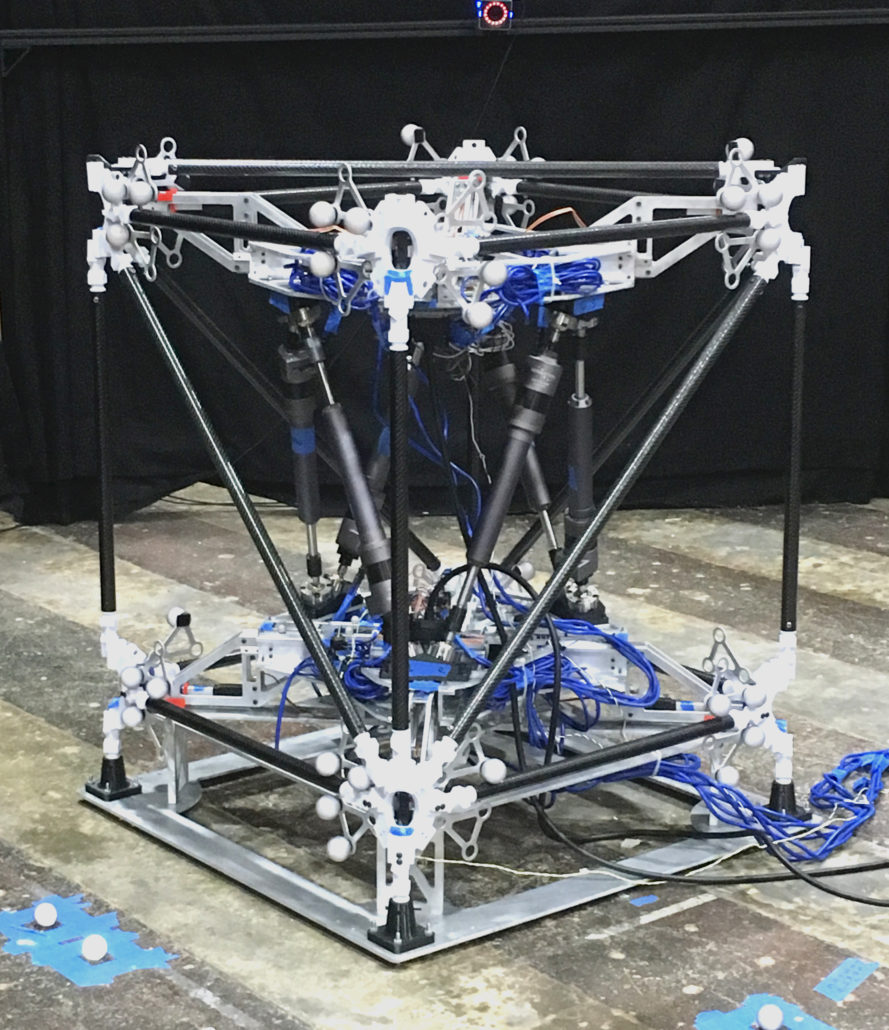
Six Standard (A1) Servo Cylinders were used on the NINJAR robot to help NASA meet its goals for robotic in-space assembly and manufacturing. The Servo Cylinders are mounted in a parallel kinematic arrangement to provide multiple degrees of freedom and high stiffness to the structure. The parallel manipulator allows for complete control over the structure’s shape with very high precision and repeatability.
More about the project here.



