Ultra Motion Servo Actuators Drive Precision in Unmanned Vehicle Control with Embention Autopilots
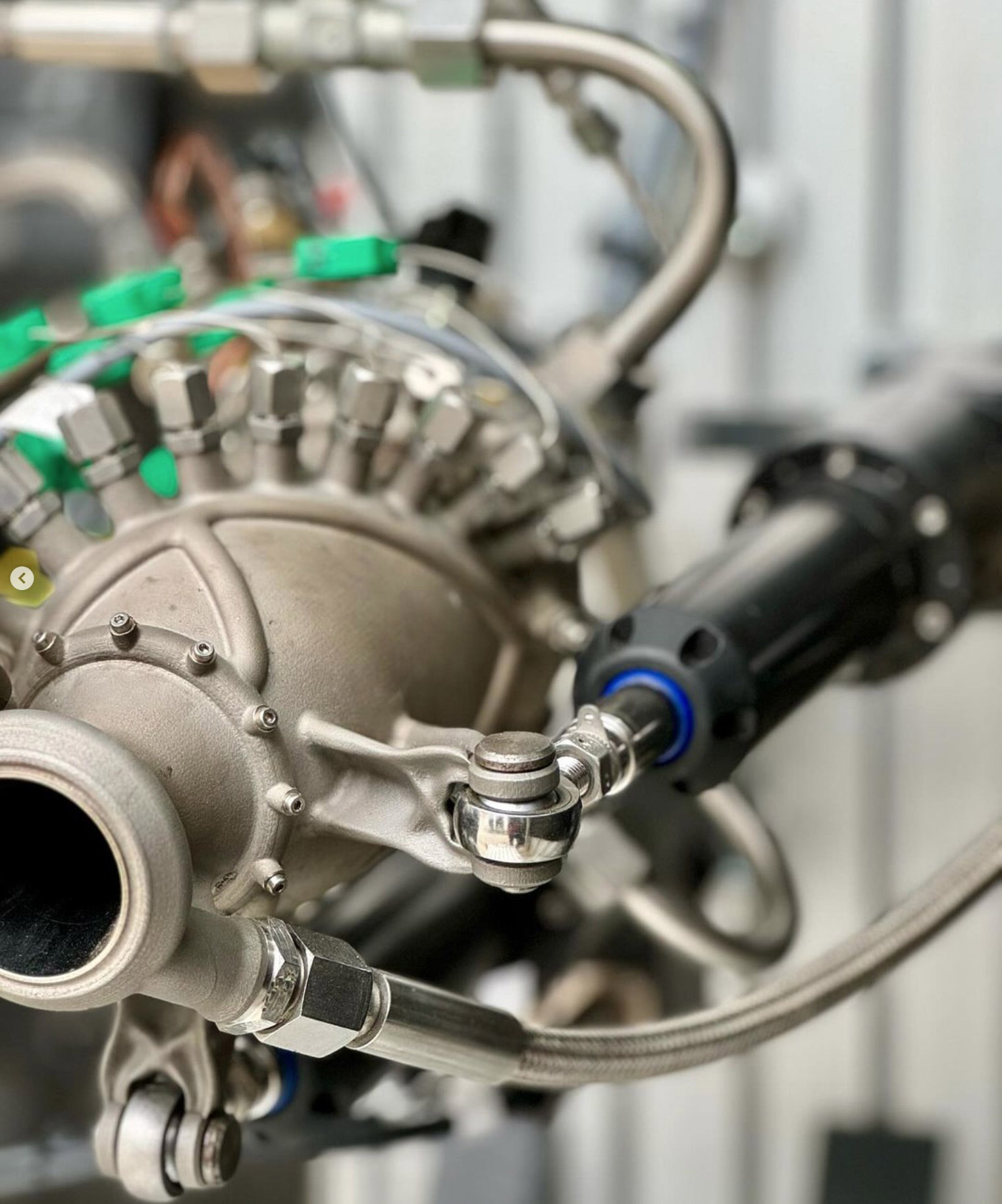
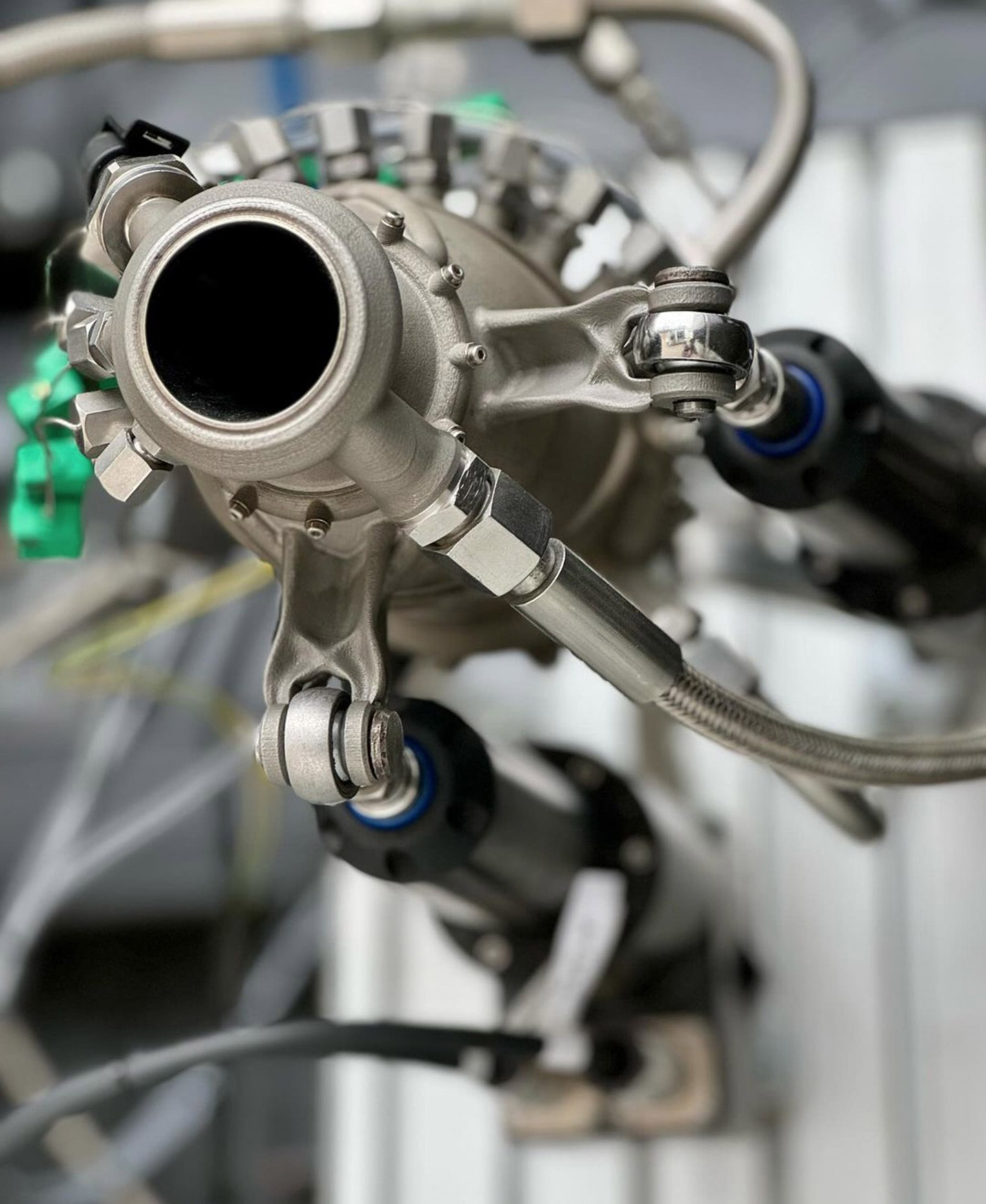
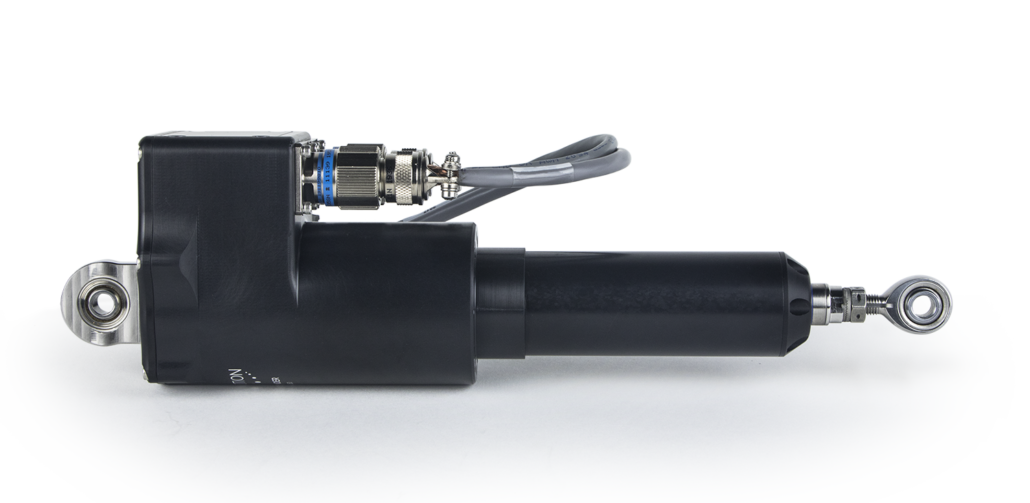
 Ultra Motion’s Servo Cylinder, L-Series, and T-Series actuators are engineered for environments where durability, precision, and real-time feedback cannot be compromised. When integrated with Embention’s Veronte Autopilots, these actuators provide the foundation for reliable, responsive, and redundant control in UAV, USV, and more advanced autonomous systems.
Ultra Motion’s Servo Cylinder, L-Series, and T-Series actuators are engineered for environments where durability, precision, and real-time feedback cannot be compromised. When integrated with Embention’s Veronte Autopilots, these actuators provide the foundation for reliable, responsive, and redundant control in UAV, USV, and more advanced autonomous systems.
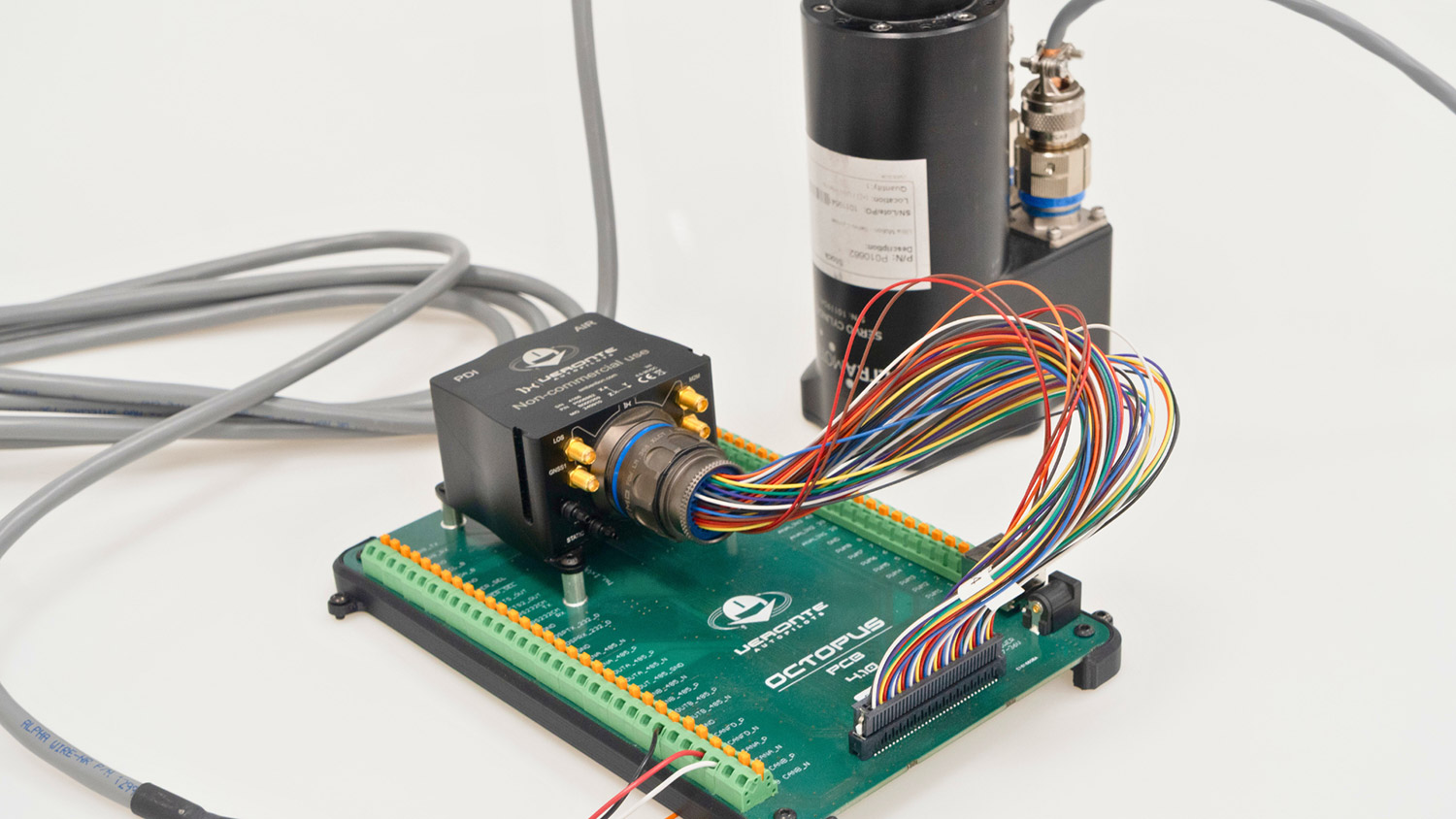
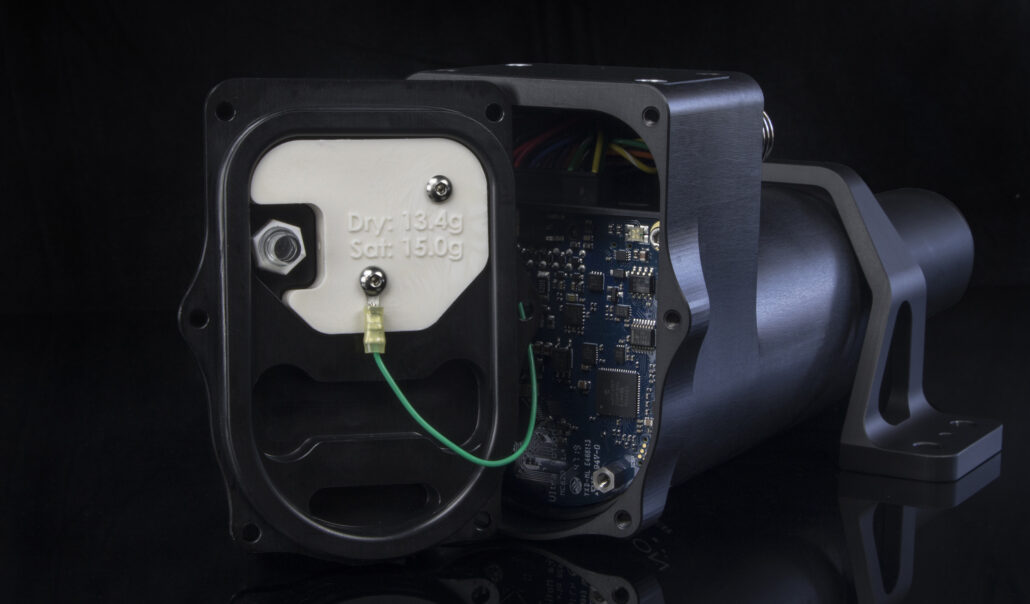
Together, the systems deliver simplified wiring, robust fault tolerance, and seamless control and feedback across diverse applications. Each servo actuator features a rugged electromechanical design, non-contact absolute position sensing, and a comprehensive telemetry suite (position, current, voltage, temperature, humidity, and status). These capabilities enable predictive maintenance, tighter integration with vehicle control algorithms, and improved situational awareness for operators.
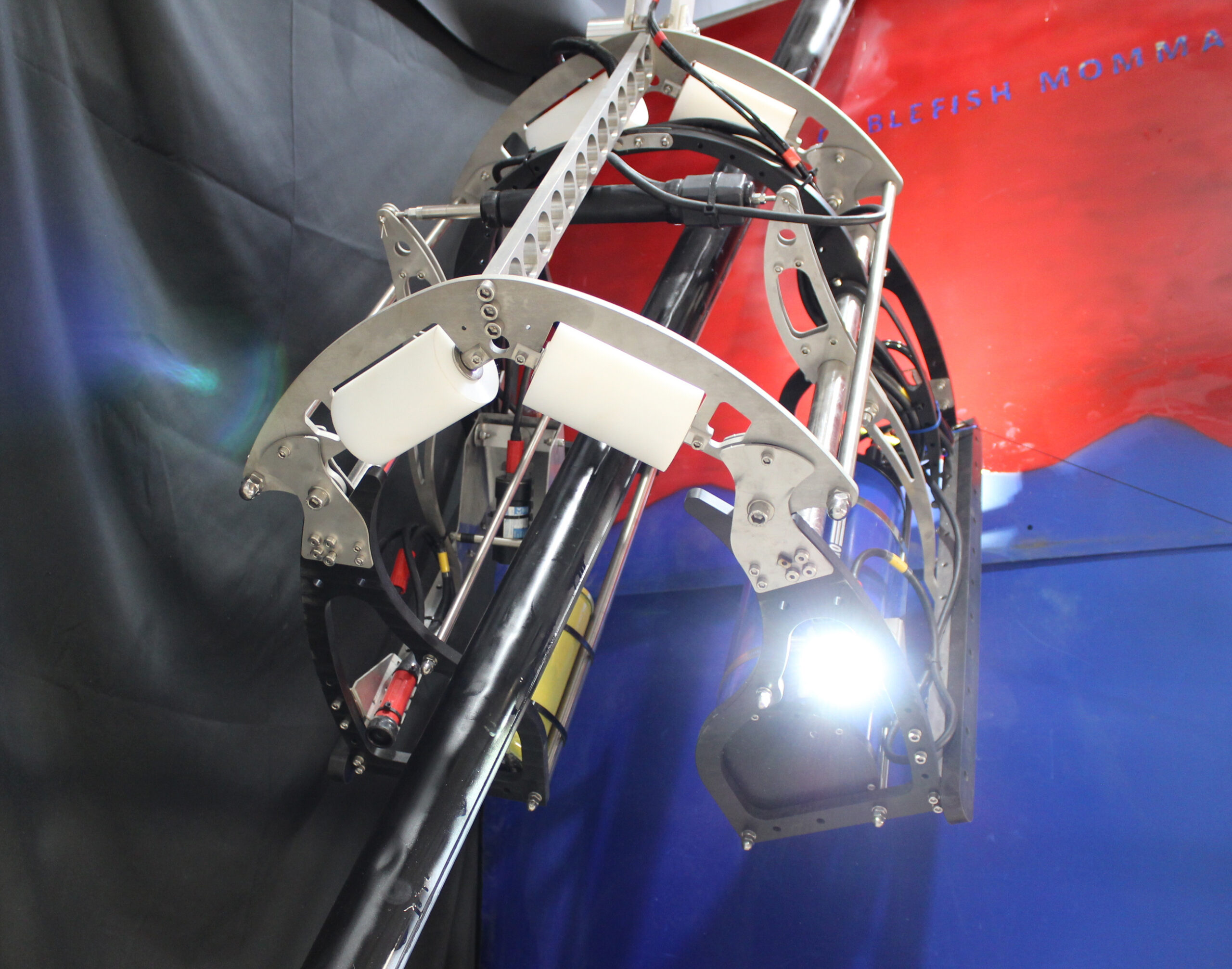
From defense and logistics to surveillance and inspection, this integration ensures mission-critical actuation that is precise, redundant-ready, and built for the future of autonomy.