Actuation Powering Adaptive Skiing Independence
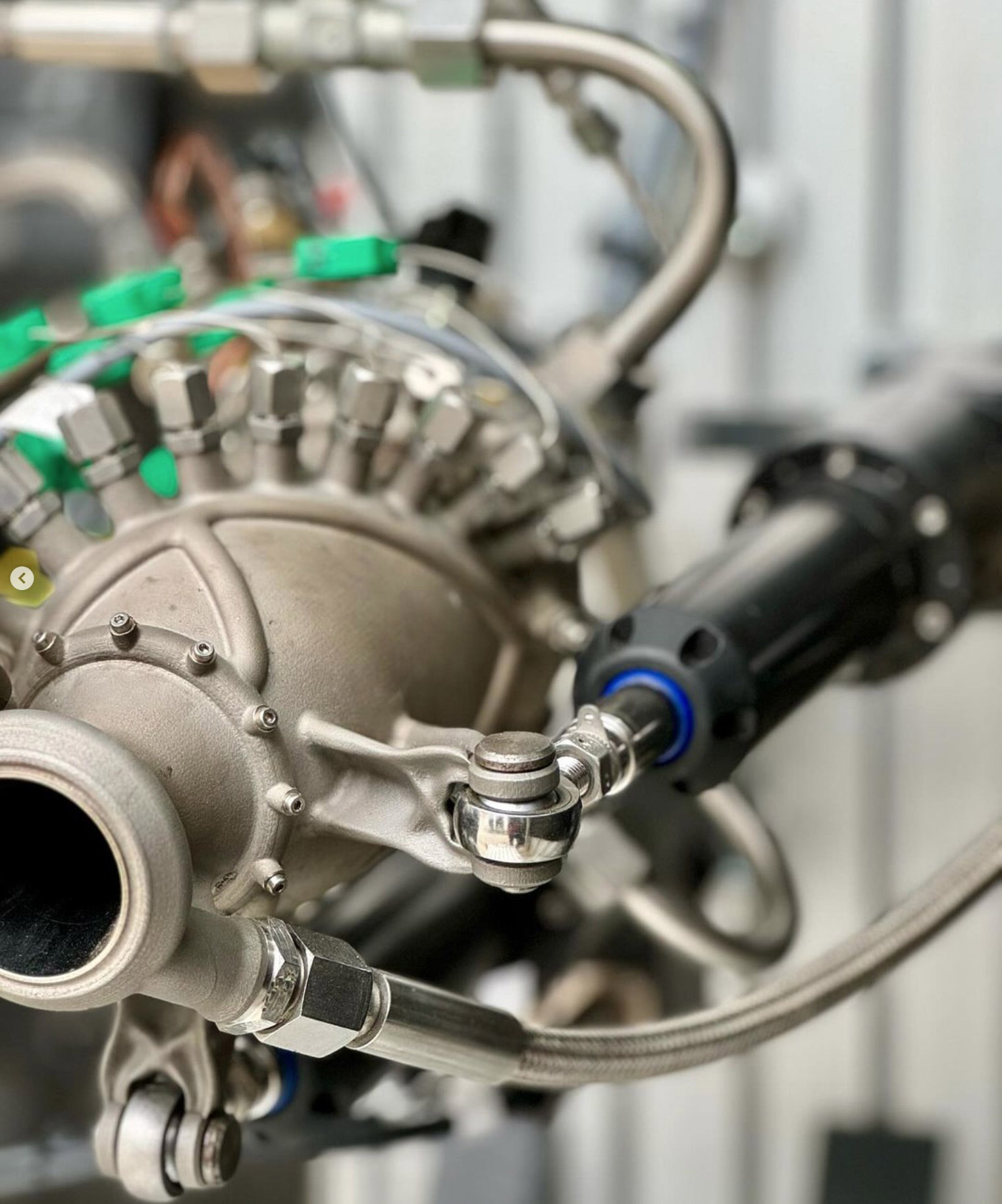
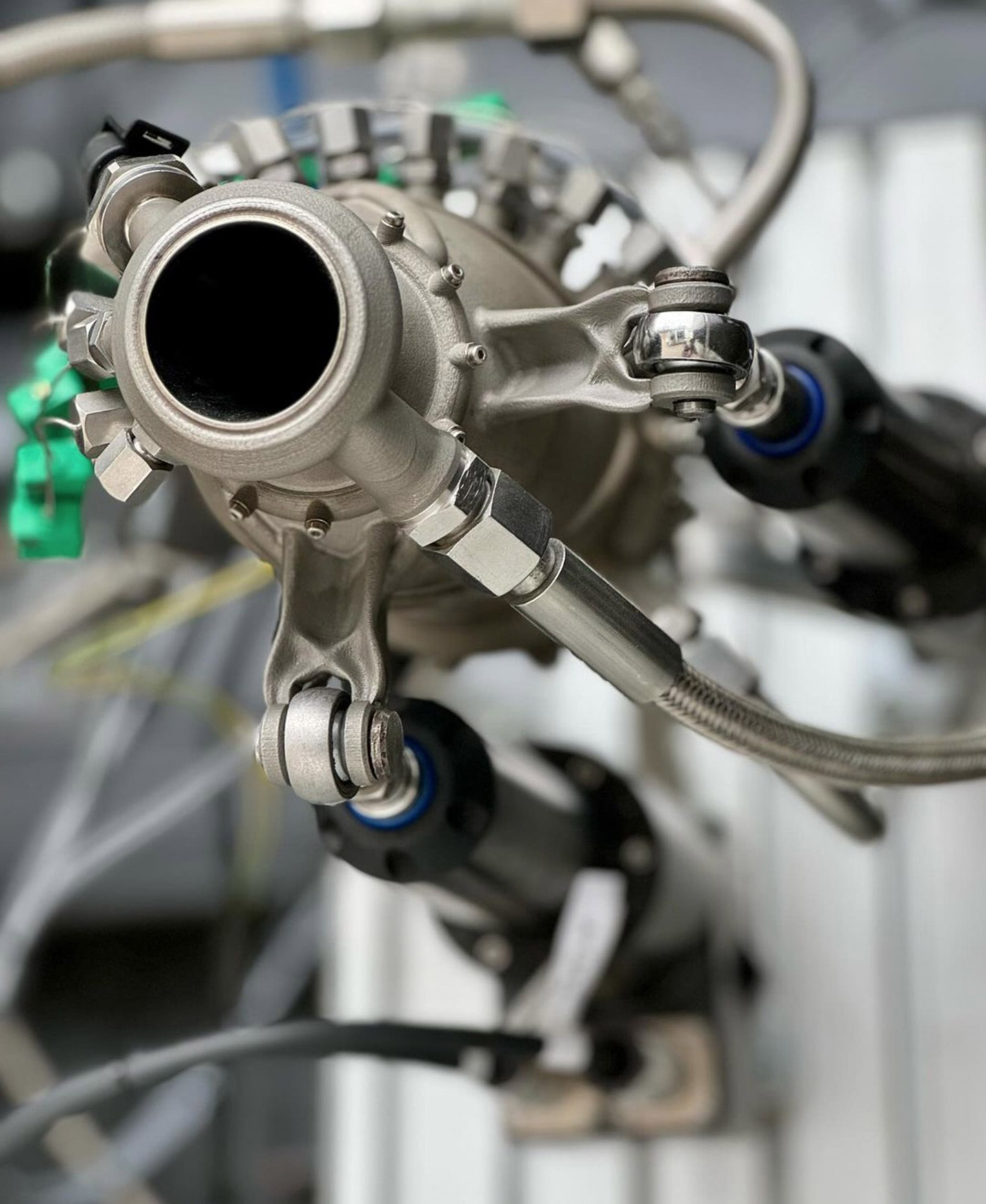
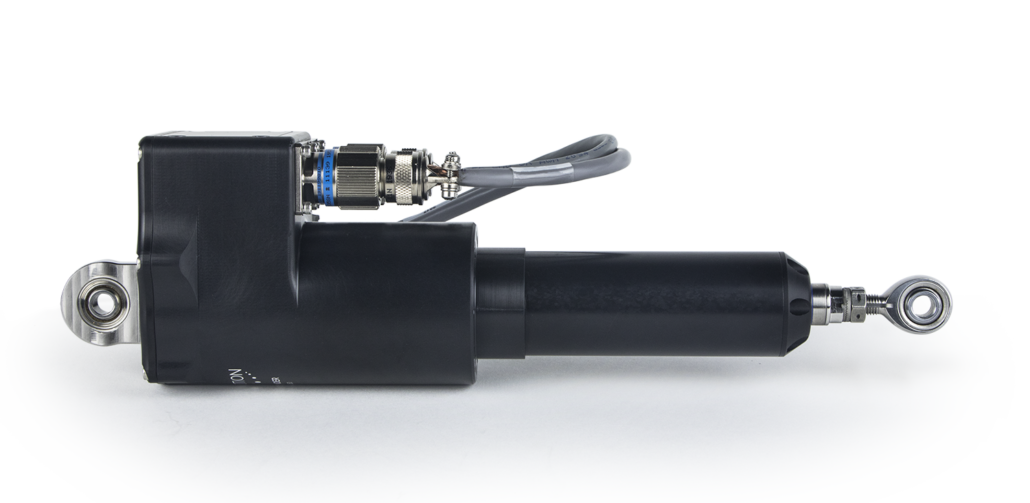
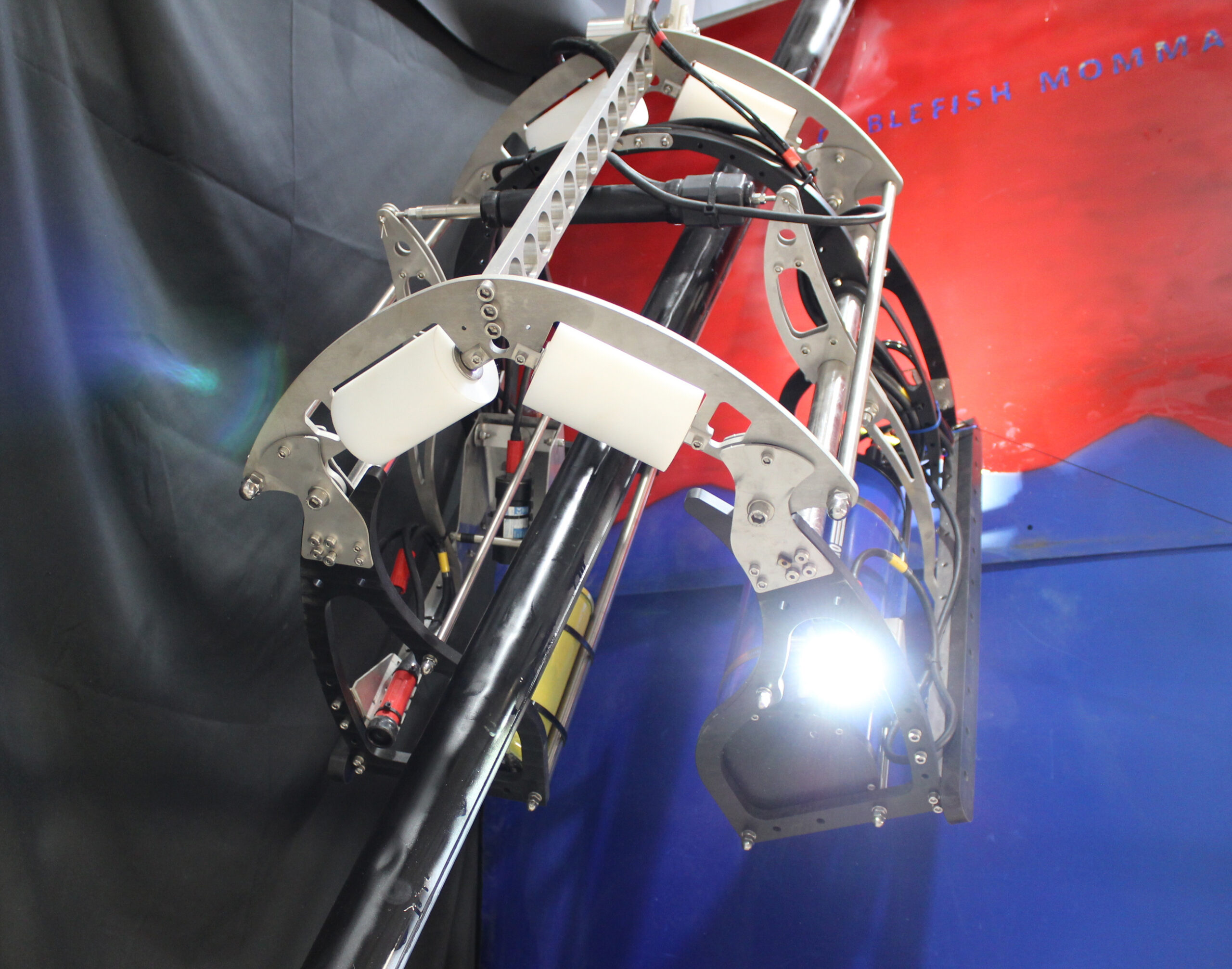
Ultra Motion’s environmentally sealed linear actuators are integrated into the TetraSki—an advanced adaptive ski system used at major ski resorts worldwide—where they convert user input into controlled mechanical motion. The result is a system that enables individuals with complex physical disabilities to independently navigate downhill terrain.
Engineered for Extreme Conditions
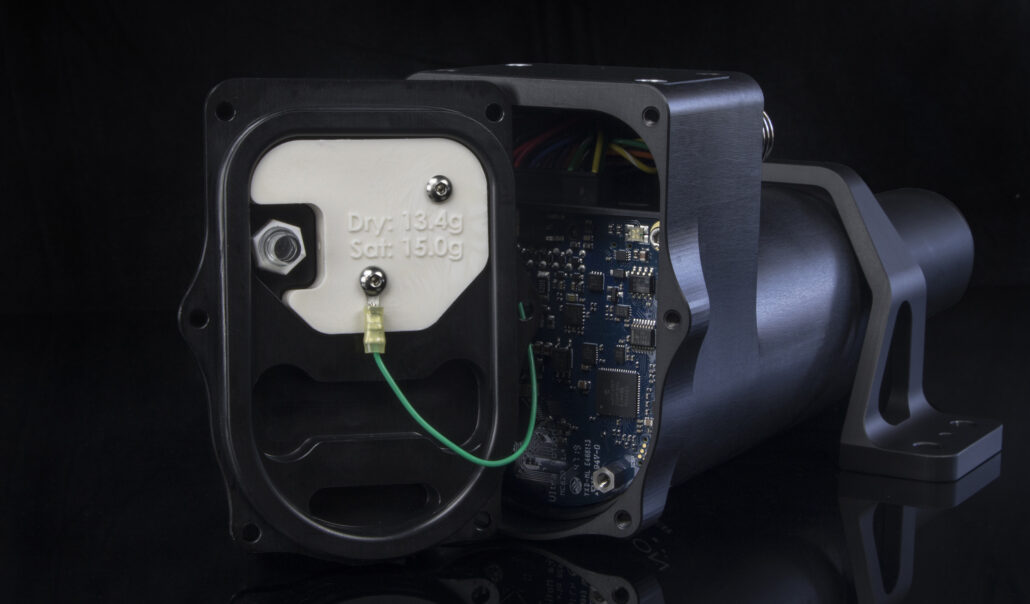
Adaptive skiing demands reliable performance in challenging environments, including cold temperatures, moisture exposure, and continuous vibration. Ultra Motion actuators are built to handle these conditions, delivering sealed protection and dependable operation in harsh outdoor settings.
From Input to Motion
User inputs—such as joysticks or sip-and-puff controls—are translated into actuator-driven adjustments that control ski orientation. The actuators serve as the direct link between user intent and motion, enabling controlled turns and speed modulation through carving dynamics.
Proven in the Field
Ultra Motion actuators have been used in this application for over a decade:
“We’ve been using your products for over 10 years now and are extremely happy with them.”
— Engineering Team Lead, TetraSki
Enabling Capability Through Motion
When motion systems are engineered for reliability and control in real environments, they enable new levels of independence and performance.
For more information on Ultra Motion actuator solutions for demanding applications, contact our team.